|
Modelado del sistema
carro-péndulo. |
|||||||||
|
A continuación, se desarrollará el
modelado del sistema carro deslizante – péndulo simple, a fin de explicar la
forma en que la ecuación de Euler-Lagrange nos permite obtener las ecuaciones
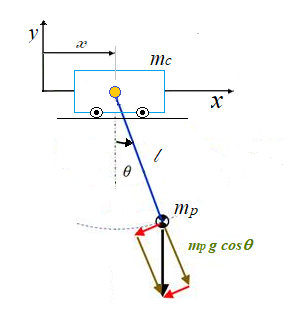
de movimiento del sistema mostrado en la siguiente figura:
Fig. 1. Sistema Carro – Péndulo. |
|||||||||
|
La ecuación de
Euler-Lagrange indica:
Donde L, se define en general como el Lagrangiano del Sistema, y
q se le conoce como el vector de coordenadas generalizadas (grados de
libertad). Así mismo, el Lagrangiano del sistema se determina restando a la
energía cinética de los cuerpos rígidos que componen el sistema la energía
potencial de los cuerpos rígidos que forman el sistema mecánico. Esto es:
Donde i se refiere al cuerpo
rígido i-ésimo que forma parte del sistema mecánico, y n el número total de
cuerpos rígidos que conforman el sistema mecánico. Para el caso que nos
ocupa, se tienen dos grados de libertad (x, θ). |
|||||||||
|
Carro deslizante. Obtengamos primero las energías del
carro deslizante, para ello consideremos que la resistencia del carro al
desplazarse en dirección horizontal es nula, es decir las fuerzas de fricción
y la resistencia del aire al chocar con el carro son despreciables, así mismo
no se consideran efectos de amortiguamiento. Bajo estas consideraciones, la energía
cinética del carro se determina como:
Por otra parte, la energía potencial
del carro es cero, debido al supuesto que el carro se desplaza sobre la
horizontal, y no se efectúa hundimiento del carro sobre la superficie por
donde se desplaza, ni tampoco algún tipo de movimiento sobre la línea vertical. |
|||||||||
|
Péndulo móvil. El movimiento péndulo se efectúa bajo el supuesto que no
hay amortiguamientos de ningún tipo, ni tampoco pérdidas de energía por
rozamiento con el aire o algún otro fenómeno que degrade el movimiento
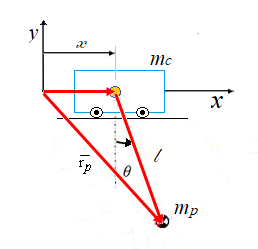
pendular. De esta forma, la energía cinética se determina a partir del vector
de posición del péndulo con respecto al sistema de referencia inercial. |
|||||||||
|
Fig. 2. Vector de posición del péndulo. |
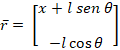
La posición del péndulo queda definida como:
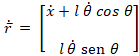
Por lo que la
velocidad queda definida como:
Por lo que la velocidad al cuadrado es:
|
||||||||
|
Por lo que
la energía cinética del péndulo resulta ser:
Por
otra parte, la energía potencial del péndulo se determina tomando como referencia
el potencial igual a cero justo en la posición en la cual el péndulo se
encuentra alineado sobre el eje vertical. En esta posición, el péndulo adopta
la posición más baja que puede lograr. Por lo que la energía potencial se
determina por la ecuación:
Sustituyendo
(3), (7) y (8) en la ecuación de Lagrange (2), resulta:
Aplicando
la ecuación Lagrangiana para la coordenada generalizada x, tenemos:
Por lo
que,
Así
mismo, resulta que:
Por lo
que la ecuación de movimiento para la coordenada x queda definida como:
Si
consideramos que la oscilación del péndulo se efectúa sobre ángulos pequeños,
resulta que esta ecuación se puede simplificar, dado que θ ≈ sen
θ y que cos θ ≈ 1, por lo que la ecuación de movimiento se
reduce a:
Tomando
como factor común la aceleración lineal:
Dividiendo entre la
suma de las masas, resulta:
Calculando ahora la
ecuación de movimiento para la coordenada generalizada θ, resulta:
Por lo que,
Así
mismo,
Sustituyendo
(18) y (19) en (1), tenemos:
Considerando
nuevamente que la oscilación del péndulo se efectúa sobre ángulos pequeños,
resulta que esta ecuación se puede simplificar, dado que θ ≈ sen
θ y que cos θ ≈ 1, obteniendo:
Dividiendo
entre mp l , resulta:
Las
ecuaciones (16) y (22) resultan ser ecuaciones diferenciales ordinarias de segundo
orden, las cuales se encuentran acopladas, esto es que se deben resolver
simultáneamente dadas las restricciones de movimiento del sistema
carro-péndulo. Despejando
de (22) la aceleración lineal, y sustituyendo en (16), y simplificando
resulta:
La
solución de esta ecuación se puede realizar aplicando métodos numéricos con
base en condiciones iniciales de velocidad y aceleración iguales a cero, y un
ángulo inicial pequeño. Queda para el lector la tarea de seleccionar el
método numérico adecuado para resolver la ecuación de movimiento. Así
mismo, se puede reconocer de ésta última ecuación que, si la masa del carro
es considerablemente mayor a la masa del péndulo el comportamiento de la
oscilación del péndulo sería similar a la oscilación del péndulo simple.
Adicionalmente, dado que para ángulos Al
desarrollar la ecuación (23) con base en una oscilación periódica cíclica,
resulta bajo el supuesto que:
Al
derivar:
Por lo que
Analizando esta última función para un
valor de ángulo inicial de 30[°, es válido considerar que la ecuación (26)
presenta valores cercanos a cero, queda como ejercicio para el lector
comprobar dicha afirmación. Por lo que la velocidad angular aproximada
resulta ser:
|
|||||||||
|
Por
otra parte, al determinar la tensión de la cuerda del péndulo, y proyectando dicha
fuerza sobre el eje horizontal resulta:
De la
segunda ley de Newton, la fuerza que mueve el carro es: Igualando (28) y (29) y despejando la
aceleración lineal, resulta:
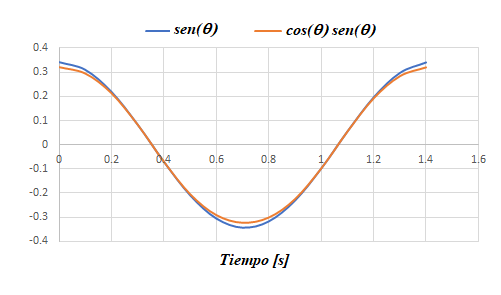
Al
graficar la función cos θ senθ, en un ciclo de la función senθ se observa:
Gráfica 1. Similitud del periodo de
senθ y cosθsenθ. Por
lo que puede deducirse que tanto x, como θ son funciones periódicas, y ambas tiene la
misma velocidad angular (w). Al resolver las ecuaciones (16) y (22) con la aproximación (27), se
obtuvo mediante simulación el movimiento del sistema: |
|||||||||
|
|
|||||||||